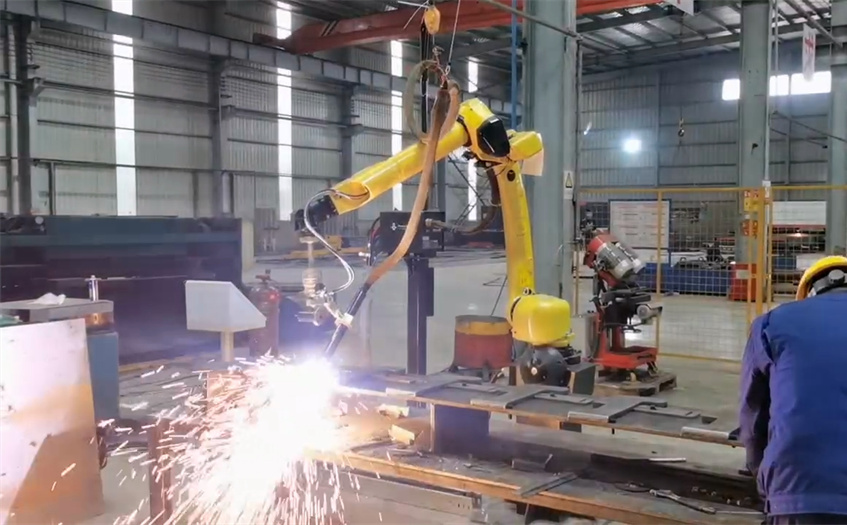
打坡口机器人是一种专门用于焊接前坡口加工的工业机器人。它们通过高精度传感器和智能控制系统,可以自动识别坡口位置和形状,并实现自动化的坡口加工。

打坡口机器人的工作原理通常包括以下步骤:
机器人通过高精度传感器对工件进行自动扫描和识别,确定坡口的位置和形状。
机器人根据识别结果,通过控制系统进行智能计算和分析,生成相应的加工轨迹。
机器人根据生成的加工轨迹,进行自动化的坡口加工操作。
打坡口机器人的应用可以大大提高焊接质量和效率,同时减少人工操作的误差和劳动强度。它们通常被应用于各种工业生产中,如汽车制造、机械制造、建筑行业等。
打坡口机器人的发展经历了多个阶段,从最初的示教编程方式到现在的智能感知和控制技术,其自动化程度和精度不断提高。未来,随着技术的不断进步和应用需求的不断深化,打坡口机器人将继续朝着更加智能化、自动化和高效化的方向发展。